Tempo de leitura: 14 minutos
Você já viu todos os passos e como se executa um projeto de mapeamento de estradas?
No último projeto realizado pelo nosso suporte técnico eles fizeram um passo a passo e contaram todos os detalhes da área utilizada.
Acompanhe a matéria para saber todas as informações.
Mapeamento de Estradas
- Planejamento (Área, Voo, Pontos de Apoio):
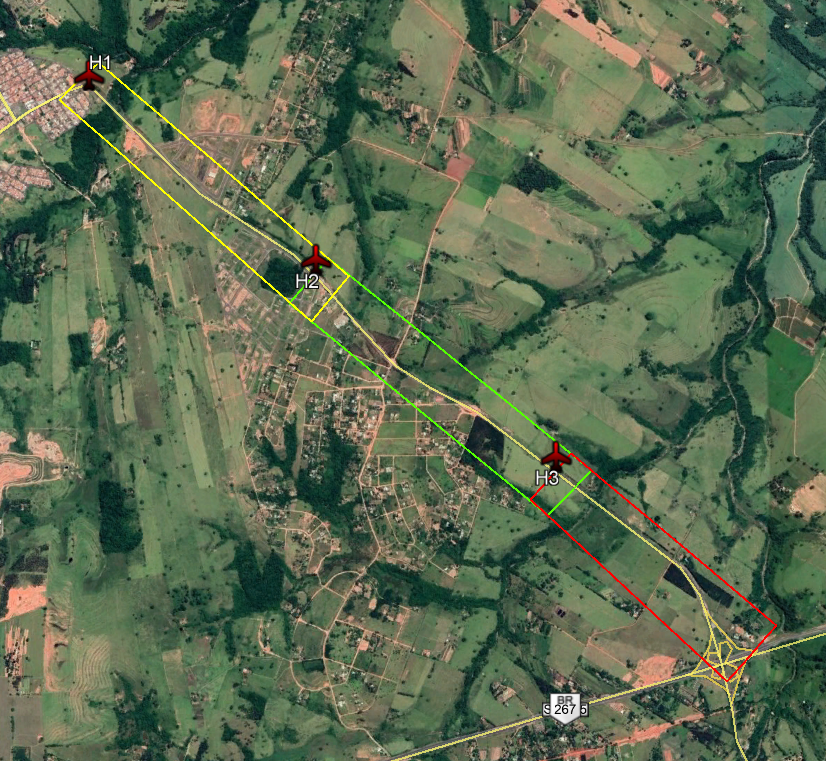
Fizemos o mapeamento de um trecho de 5 Km da Rodovia Ângelo Rena, localizada em Presidente Prudente. Visando obter um bom nível de detalhamento, o projeto foi planejado para atingir um GSD de 5cm. Inicialmente, foi realizado o planejamento da área de voo no Google Earth considerando uma faixa lateral de 150m a partir do eixo da rodovia, totalizando uma área de 172 ha.

Utilizamos o drone MAVIC 2 PRO para realizar os voos, desta forma a área de interesse foi dividida de acordo com a autonomia do drone sendo planejado uma bateria por voo. Em vista desse planejamento, a região de interesse foi dividida em três áreas de voo com aproximadamente 60 ha cada uma. Além das delimitações foram planejados quais seriam os lugares mais indicados para a decolagem do drone (home point) representados por aviões na imagem.
Após delimitar as áreas de voo, foi utilizado o aplicativo DroneDeploy para realizar o planejamento de voo automatizado. É importante destacar nessa hora o tipo de voo que será realizado, considerando a forma da feição que será mapeada. Como podemos observar a rodovia pode ser definida como uma linha e para realizar o seu mapeamento a área de voo sempre apresentará forma de faixas estreitas. Essa observação é importante pois define um tipo de voo, chamado voo de corredor ou voo linear e deve ser aplicado toda vez que a área de interesse for uma feição linear (estradas, linhas de transmissão, ferrovias…).
Na etapa de planejamento das áreas de voo é muito importante garantir uma área de sobreposição entre os voos, pois um dos principais desafios de processar áreas lineares (mapeamento de corredor) é fazer a junção dos voos no software de processamento.
O DroneDeploy permite que os planejamentos de voos sejam feitos de forma gratuita. Para realizar o voo de corredor existe um aplicativo específico dentro do DroneDeploy chamado Linear Flight Plan, esse aplicativo é liberado para as contas triais, entretanto após o período de 14 dias só é liberado nas versões pagas. As configurações foram:
- GSD: 4cm (o esperado é 5cm, estipulamos 4cm devido a variação do relevo)
- Altura de Voo: 170m
- Sobreposição (Longitudinal e Lateral): 80% e 60%
- Faixas de Voo: 4

Após delimitar as áreas de voo, o próximo planejamento feito foi a distribuição dos pontos de apoio. Sempre enfatizamos que não existe uma regra em específico que delimite a quantidade de pontos de apoio em cada projeto, por isso a DronEng desenvolveu uma metodologia para realizar essa distribuição (confira aqui). Entretanto, quando se trata de mapeamento de estradas essa metodologia se torna mais fácil pois podemos colocar alguns parâmetros quantitativos na distribuição desses pontos.
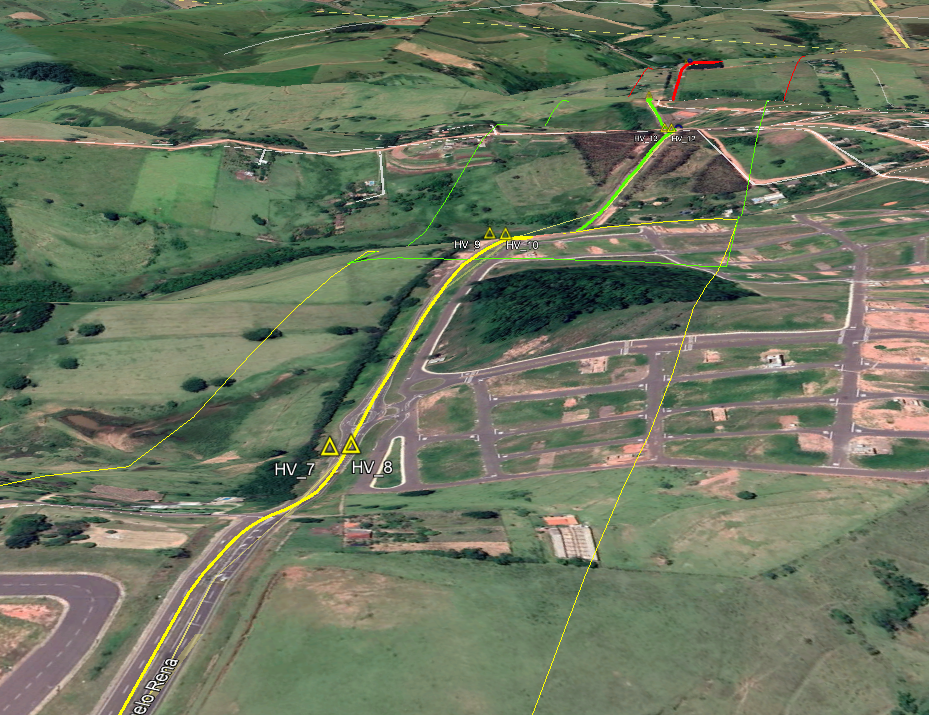
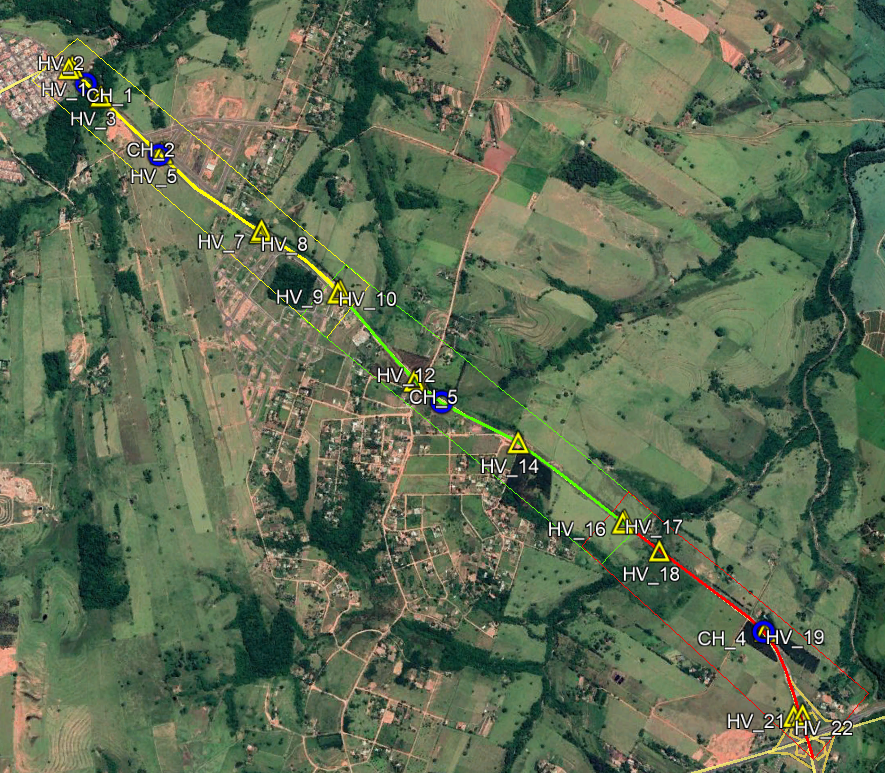
Para realizar a distribuição dos pontos de apoio em mapeamentos de corredor você pode seguir a seguinte regra: distribuir um par de pontos de controle a cada 1Km (2Km quando a área for plana e sem curvas) e distribuir um ponto de verificação a cada 3Km. As regras como pontos de controle em áreas de sobreposição entre voos (HV_9 e HV_10) e pontos de controle em áreas com grandes variações altimétricas continuam (HV_7 e HV_8). Além disso, um dica é colocar pontos de controle em regiões de curvas.
Desta forma, foram planejados 18 pontos de controle e 6 pontos de verificação, entretanto após o pós-processamento houveram 4 pontos que não fixaram, desta forma ficaram 16 pontos de controle e 4 pontos de verificação:
- Execução campo:
Coleta dos pontos de apoio
Os pontos de apoio são de extrema importância para garantir uma acurácia posicional para o projeto. Neste projeto utilizamos 2 receptores GNSS Hiper Lite da Topcon para rastrear os pontos de apoio através do posicionamento relativo estático rápido, que consiste basicamente em rastrear as coordenadas de interesse em um tempo máximo de 20 minutos, sem ter que manter o equipamento coletando dados no deslocamento entre os pontos de interesse. Os dois receptores foram utilizados para rastreio das coordenadas e a estação PPTE da RBMC (Rede Brasileira de Monitoramento Contínuo) foi utilizada como base para o pós-processamento.
Antes de ir à campo, o planejamento desses pontos se torna necessário, pois a quantidade de pontos levantados, sua distribuição, e toda a logística da coleta reflete diretamente na qualidade final do projeto. Esse planejamento deve ser realizado em escritório, juntamente com a equipe responsável, que no nosso caso foi composta por 4 pessoas divididas em 2 equipes.
Uma equipe ficou com 12 pontos, e a outra com 12, totalizando 24 pontos de apoio divididos em 18 pontos de controle e 6 pontos de verificação (check). Os equipamentos utilizados foram: 1 tripé e 1 bipé, 2 receptores GNSS, 1 base nivelante, 2 trenas de 3 metros, 2 pranchetas, planilhas de campo, chapéus, coletes, cones de sinalização, 2 latas de tinta branca e 2 pincéis para materializar os pontos na rodovia. Os receptores devem ser configurados antes de ir à campo, nós utilizamos o software PCCDU para esse procedimento.
![]()
Antes de ir a campo, fazer o download do planejamento dos pontos de apoio (arquivo KML) que foi feito no Google Earth é uma dica muito importante, pois muitas vezes em campo não se tem acesso à internet, e sem esse arquivo a falta de localização dos pontos pode atrasar o andamento de todo o projeto. É possível salvar esse KML na sua conta do Google e abrir em campo no seu celular. Além disso, observar a previsão do tempo no dia do campo é um fator crucial, qualquer precipitação pode danificar o receptor GNSS, por isso o recomendado é que se faça a coleta com o céu mais limpo possível.
A duração do nosso levantamento foi de um dia e meio; devido ao tempo de chuva que pegamos houve um pequeno atraso em relação ao que foi pensado em escritório, mas nada que prejudicou o resultado final, até porque imprevistos acontecem, e para evitar atrasos na entrega do projeto, recomendamos sempre que o tempo planejado seja maior do que o realmente executado em prática.
Concluído o levantamento, os alvos devem ser pintados logo em seguida para as marcações com tinta não sumirem. A maneira mais usual e recomendada, é fazer os alvos com tinta branca e em um tamanho mínimo de 10 vezes o tamanho esperado do GSD, para ficar bem visível nas imagens. Os materiais necessários são: 2 latas de tinta (as mesmas utilizadas anteriormente), 1 garrafa pet com água para misturar com a tinta, 2 recipientes para colocar essa mistura e 2 rolos de pintura. Deve-se tomar muito cuidado no momento de pintar, pois, se o centro da “cruz” for perdido, a coordenada daquele ponto também será descartada, pois não estará representando o centro exato do alvo que foi rastreada a coordenada com o receptor.
Para evitar esse tipo de erro, a gente recomenda que seja usado o rolo de pintura para completar a “cruz”, e o pincel para detalhar a pintura próxima do centro, preservando a marcação que foi feita no momento de coleta das coordenadas. A pintura de todos os alvos demorou cerca de meio dia, completando 2 dias de campo até aqui.

Outro aspecto muito importante de ser planejado no projeto é a segurança do trabalho. Principalmente em projetos de mapeamento de rodovias, é essencial que o profissional que vá a campo esteja bem sinalizado com um colete sinalizador e com um botina para proteger os pés, além disso é importante levar cones para sinalizar na estrada a presença da equipe e dos equipamentos nos acostamentos. Outros acessórios necessários são: garrafas d’água para hidratação, principalmente em trabalhos que demandam um dia em campo; protetor solar; óculos de sol; chapéu; e repelente.
Processamento dos Pontos de Apoio
Como já citado, foi utilizado um método de rastreio pós-processado, ou seja, os dados rastreados em campo necessitam de um processamento em escritório para serem obtidas as coordenadas. A distância entre a estação da RBMC (base) e a área de mapeamento foi em média de 5 a 10Km, desta forma estimou-se o tempo médio de rastreio de 20min por ponto.
O software utilizado para realizar esse processamento foi o RTKlib, um programa gratuito que pode ser baixado na internet. Para isso convertemos todos os arquivos brutos dos receptores GNSS para o formato RINEX aceito pelo software.
O processamento foi realizado ponto por ponto, gerando 24 arquivos diferentes no total, com todas as coordenadas obtidas de acordo com o intervalo de coleta (5 seg) estipulado no momento de configuração dos receptores; ou seja, ocupando o ponto por 20 min com um intervalo de coleta de 5 seg, obtivemos 240 coordenadas por ponto de interesse.
Sendo de nosso interesse uma única coordenada, deve-se escolher a que foi obtida na última época, ou seja, no último momento de coleta, porque quanto mais tempo no ponto, mais preciso é aquele valor. Dessa forma a coordenada vai estar fixa (Q=1) e com o menor desvio padrão. Se caso algum ponto apresentar o valor de Q=2, quer dizer que aquela coordenada é flutuante e não se pode confiar 100% (provavelmente vai apresentar erros durante o processamento fotogramétrico).
Após o processamento dos 24 pontos, tivemos 4 pontos com a solução float (flutuante) e foram desconsiderados do projeto. Esses pontos estavam localizados em regiões do acostamento que possuía menos de 1m de largura, ou seja, nossa equipe enfrentou duas problemáticas, sendo a primeira a falta de acostamento em partes da rodovia e a segunda foi o fluxo de veículos que passavam pela rodovia. Esses dois fatores colaboraram para que os pontos tivessem suas coordenadas flutuantes, pois o receptor GNSS sofreu influências da movimentação dos veículos por estar muito próximo a rodovia.
Recomendamos que a cada ponto processado a coordenada escolhida seja copiada e colada para um arquivo .txt com cabeçalho, para posteriormente ser importado no software de processamento fotogramétrico.
Voo
Foram necessários 3 voos em torno de 15 minutos cada para mapear a área total, lembrando que esses parâmetros são específicos para o projeto em questão. O tipo de voo realizado é o linear, já que a área de estudo é nesse mesmo formato; e para acessar de maneira gratuita a parte do DroneDeploy que permite a realização desse tipo de voo, é necessário que você crie uma conta business (14 dias de duração), na qual aparece a opção logo na primeira página do aplicativo.
É interessante ressaltar a importância de verificar a previsão do tempo no dia do voo, pois como dito anteriormente, qualquer imprevisto do gênero pode acarretar no atraso da entrega final do projeto. No dia planejado nos deparamos com um começo de chuva no final do primeiro voo, e por esse motivo tivemos que descer rapidamente o equipamento, cessar a atividade e voltar no dia seguinte, retomando o planejamento do voo.
O voo faz parte da última etapa de campo do projeto, na qual foi concluída com 3 dias e meio, levando em conta todos os imprevistos citados. O ideal é chegar no escritório e já descarregar as imagens para o computador em que vai ser realizado o processamento fotogramétrico.
- Processamento:
O processamento fotogramétrico foi realizado utilizando o software Agisoft Metashape, logo após o processamento dos pontos de apoio e a execução dos voos. Considerando que a área mapeada (5km) foi relativamente pequena, o processamento fotogramétrico demorou um dia e meio para ser finalizado, gerando todos os produtos citados abaixo. Esse tempo depende muito do tamanho da área e da máquina utilizada, no nosso caso, o computador do escritório apresenta as seguintes configurações:
- Processador: i7 CPU 4.20 GHz
- Memória RAM: 32 GB
- Tipo do Sistema: 64 bits
- Placa de Vídeo: GeForce GTX 1080 Ti
O primeiro desafio é realizar o primeiro alinhamento de fotos nas regiões de sobreposição entre voos, por serem feições estreitas tendem a dificultar a região do alinhamento, além de não alinharem caso não haja uma sobreposição adequada.
A segunda etapa que merece atenção no processamento de mapeamento de corredor é a pontaria dos pontos de apoio. Nessa etapa se um ponto de apoio fica com a qualidade ruim afeta todos os outros pontos, esse processo acontece para todos os projetos, entretanto em projetos de mapeamento linear esse erro impacta mais os outros pontos pois estão posicionados basicamente em uma “linha”, afetando mais a qualidade geométrica.

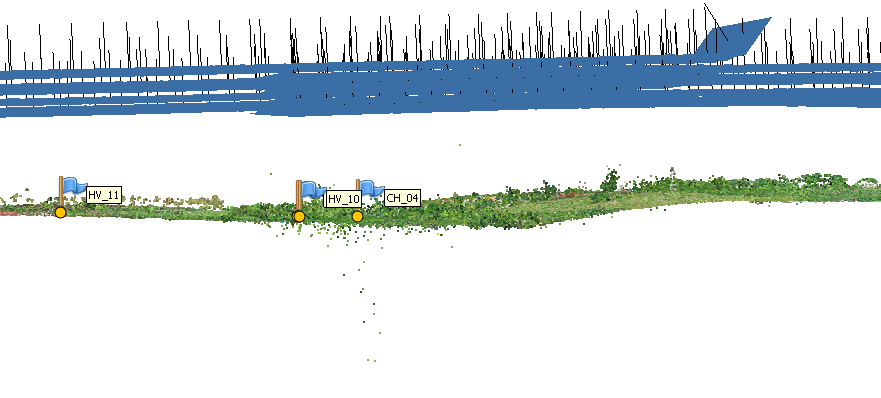
Um dos produtos gerados foi a nuvem densa de pontos com mais de 114 milhões de pontos. Esse produto é muito utilizado para elaborar planejamentos no software Autocad Civil 3D.

A partir da nuvem de pontos é possível gerar um modelo 3D da feição mapeada. Esse modelo (malha ou mesh) foi gerado por mais de 22 milhões de faces.

Foram gerados os modelos digitais de elevação MDT (Modelo Digital de Terreno) e MDS (Modelo Digital de Superfície):
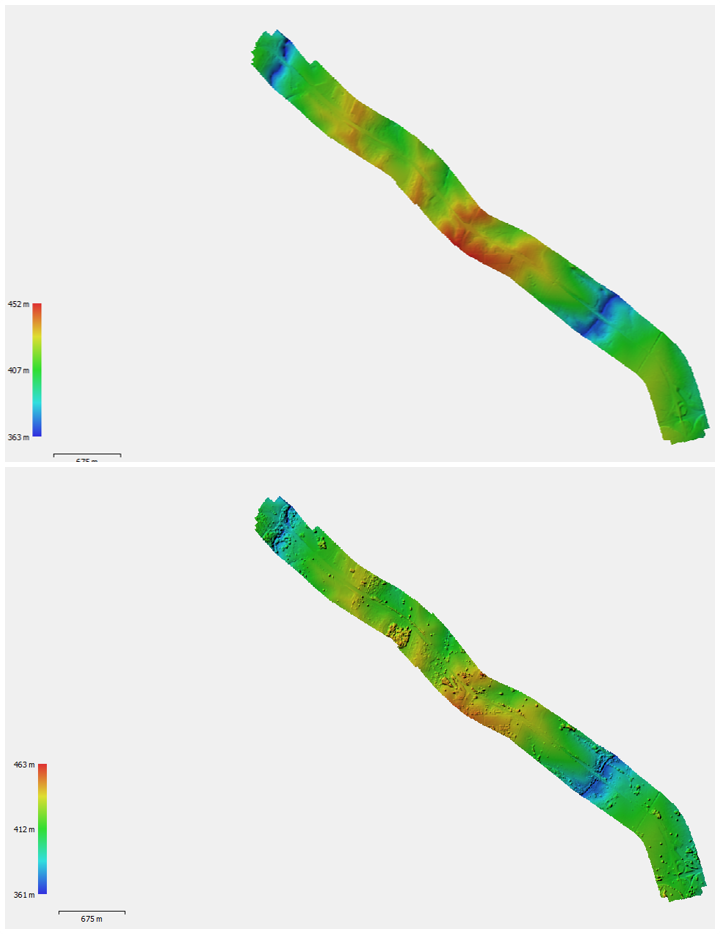
A partir do MDT foi possível gerar as curvas de nível com equidistância de 1 m para a área de interesse da rodovia. Como observado no MDT a rodovia apresenta várias regiões com variação altimétrica significativas.

O último desafio do processamento de mapeamento de corredor é a edição do Mosaico de Ortofotos. Um dos principais motivos para o voo ser linear (de corredor) é a questão de o voo acompanhar o sentido da feição mapeada. Quando o voo não acompanha o sentido da feição, (principalmente em projetos de linha de transmissão) comumente ocorrem erros na geração do Mosaico de Ortofotos onde as feições não “encaixam”, ou seja, não apresentam continuidade. Caso o voo não seja feito de forma linear acompanhando o sentido da feição, são impossíveis de corrigir.

O Mosaico de Ortofotos gerado possui o GSD de 4,34cm atendendo o nível de detalhamento planejado.

Uma aplicação com esse produto, por exemplo, pode ser a análise da degradação da rodovia, sendo possível identificar facilmente os buracos presentes e como está o estado das faixas pintadas.

- Análise de qualidade:
Para analisar a qualidade do projeto seguimos como referência Grahan e Koh (2002), onde o erro máximo esperado em planimetria deve ser 1,5 x GSD e em altimetria 3 x GSD. Desta forma, o GSD final do projeto ficou em 4,34cm, a tabela abaixo mostra que o projeto passou no controle de qualidade.

Autoras:
Engenheira Cartógrafa: Allana Pracuccio.
Graduanda em Engenharia Cartográfica: Nathalia Betoni.
Para saber mais:
Webinar: Mapeamento de Estradas e Linhas de Transmissão.
Como confeccionar um alvo em campo.
Curso Presencial Mapeamento de Estradas e Linhas de Transmissão
A novidade de 2020 é o novo Curso Presencial de Mapeamento de Estradas e Linhas de Transmissão.
No assunto desta matéria você já pôde acompanhar um pouquinho de como são realizados esses projetos, mas o curso é uma imersão em conteúdo para você não errar nos seus trabalhos.
Para conferir mais sobre isso e todas as informações, é só clicar na imagem abaixo.
Não perca a oportunidade e venha para o primeiro curso que tiver, saia na frente de todo mundo! Te espero por aqui.






