Tempo de leitura: 7 minutos
Uma das grandes dificuldades do planejamento de voo para equipamentos de baixa autonomia são os voos em grandes áreas, pois a autonomia dos VARPS (Veículos Aéreos Remotamente Pilotados), principalmente no que se refere aos multirotores por conta dos vários motores funcionando simultaneamente.
Para pequenas áreas os multirotores são excelentes devido a praticidade de operação, mas quando se refere a mapeamento de grandes áreas os asas fixas como o BATMAP saem na frente devido a capacidade de planar durante o voo, o que economiza uma boa quantidade de bateria.
Ok, mas eu tenho uma área grande para mapear e não disponho de recursos para a compra de um asa fixa no momento, ou de um outro equipamento com grande autonomia, tenho um DJI Phantom 4, por exemplo, e quero mapear uma área grande. O que faço? Como deve ser o procedimento no planejamento e execução em campo?
Vamos lá: os Drones produzidos pela DJI são de fácil operação e boa parte deles são consideradas de baixo custo, e ainda produzem resultados considerados bons possibilitando a iniciação no mercado de mapeamento aéreo com Drones.
Vamos utilizar aqui um exemplo prático de planejamento e operação utilizando o DJI Phantom 4, pois é um equipamento com custo benefício muito bom, e uma excelente ferramenta para quem está iniciando neste mercado (O Phantom 4 PRO tem um resultado melhor por possuir um sensor maior que gera imagens maiores, com isso, consegue cobrir a mesma área fazendo menos fotos em relação ao Phantom 4, porém o custo dele é maior).
Considerando uma área da cidade de Presidente Prudente – SP, onde está localizada a sede da Droneng, está área tem aproximadamente 78 hectares e deve ser voada utilizando um GSD de 3 cm.
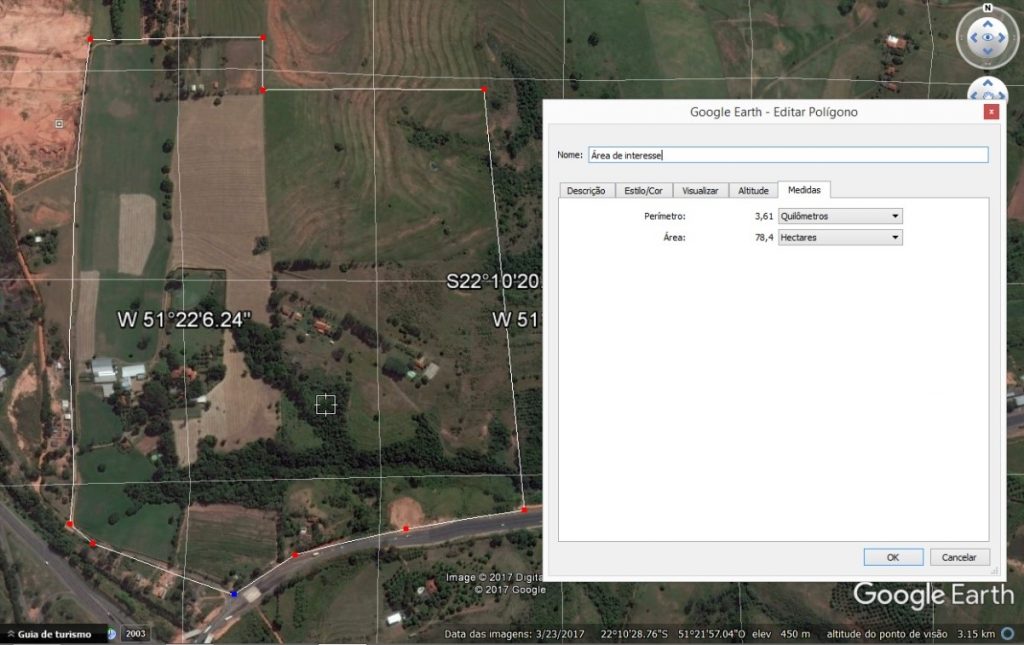
O primeiro passo é analisar a área utilizando o Google Earth, a partir do .kml da área que deve ser fornecido pelo cliente ou então criado por você a partir das informações fornecidas pelo cliente.
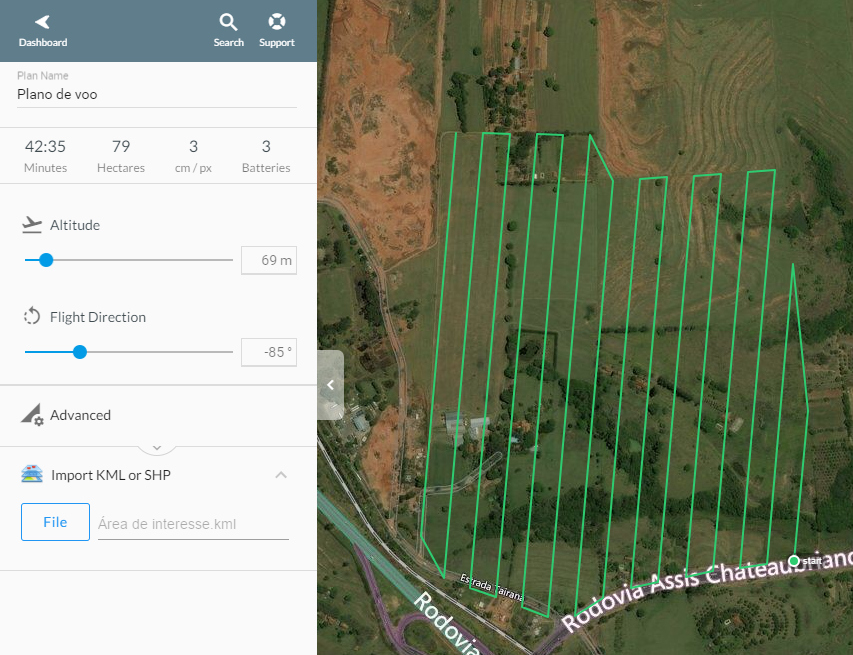
É possível fazer o planejamento de duas maneiras, a primeira é fazer um plano de voo só da área inteira e segmenta-lo em campo mudando as baterias, da seguinte maneira: Primeiro você precisa de no mínimo 3 baterias (para este trabalho) carregadas, em campo o processo é bem simples, após iniciar o voo o Phantom irá seguir para o primeiro waypoint da missão, e fará as faixas de voo até que a bateria chegue a 20% de carga.
Quando chegar a esta porcentagem ele irá retornar para a base e fazer o pouso automaticamente, em seguida você deve desligar o equipamento e trocar a bateria, depois liga-lo novamente, o aplicativo irá reconhecer a conexão e reconhecerá o plano de voo, em seguida basta mandar o Phantom continuar a missão, ele continuará a missão até que a bateria chegue a 20% novamente, e repete o processo até finalizar o voo. Após finalizar os 3 voos o resultado será parecido com o do planejamento, como se tivesse sido feito um único voo com todas as imagens.
Outra maneira de fazer este planejamento é segmentando a área de voo grande em áreas menores, de maneira que cada voo consuma no máximo 1 bateria do Drone. Para isso você precisa saber qual a capacidade de mapeamento do Drone de acordo com o GSD, que neste caso é de 3 cm, então, utilizando o mesmo aplicativo você delimita uma área de voo até que atinja 80% da capacidade de uma bateria.
Por exemplo, se a autonomia de voo do seu equipamento é de 25 minutos de voo, então você deve planejar com 20 minutos ou menos, pois os 5 minutos retirados são aproximadamente 20% da autonomia total, que faz com que o Drone retorne para a base quando chega a esta porcentagem. Esta etapa exige cuidado pois se faltar bateria irá faltar área a ser voada e isso pode prejudicar seu procedimento de campo, necessitando de outra bateria para finalizar o voo e atrapalhando seu planejamento.
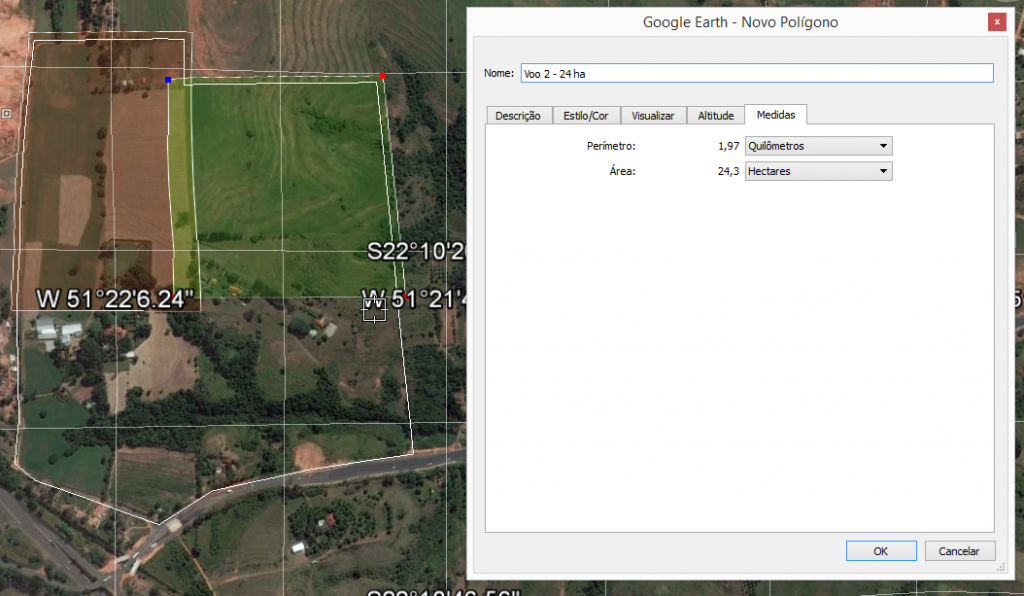
Levando-se em consideração as informações acima definiu-se uma área máxima de voo utilizando apenas uma bateria, como mostra a imagem abaixo.
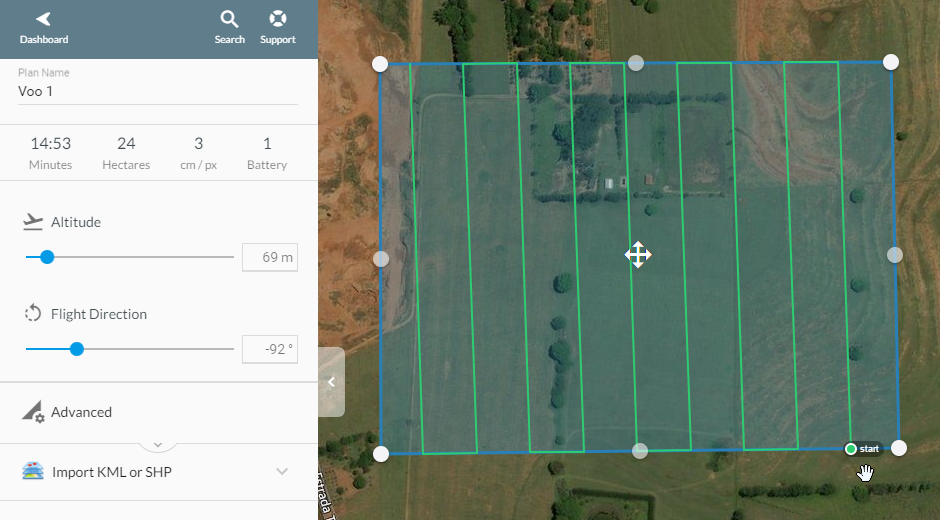
O planejamento foi de no máximo 20 minutos de voo, porém o aplicativo mostrou que até 15 minutos de voo ele faria com apenas uma bateria, um pouco mais que isso já seria necessário 2 baterias, então, neste caso utilizaremos uma área de 24 hectares por bateria.
A partir destas informações: 1 bateria = 15 minutos de voo = 24 hectares, e uma área total de 78 hectares. Se fizermos uma conta direta, dividindo 78 hectares da área total pelos 24 hectares de cada voo teremos 3,25 voos, ou seja, um pouco mais do que o planejamento de voo da área toda junta, mas, existe um porém aqui que deve ser levado em consideração, para não haver degrau (quando dois voos processados não se encaixam) é necessários utilizar duas regras.
REGRAS
1ª – Os voos devem ter uma sobreposição entre si, não existe um valor específico para isto, contudo deve-se garantir que eles tenham sobreposição suficiente para que após processados separadamente, ao serem unificados haja informação suficiente entre as duas áreas para que a junção (Chamada de chunk no Agisoft) produza um bom resultado;
2ª – Para conseguir atingir um resultado mais confiável no processamento do Chunk é necessário que nas áreas de sobreposição dos voos tenham pontos de controle (pontos utilizados na Fototriangulação do Bloco) e/ou pontos de verificação (Análise da qualidade do processamento), caso não tenham você pode criar os pontos no próprio Agisoft PhotoScan, para isto você deverá encontrar detalhes em solo que possa ser marcado.
Muita teoria, certo? Certo! Teoria é importante para que você saiba o que está sendo feito na prática, apertar botão sem saber o que está acontecendo gera muitos riscos, principalmente produtos de má qualidade.
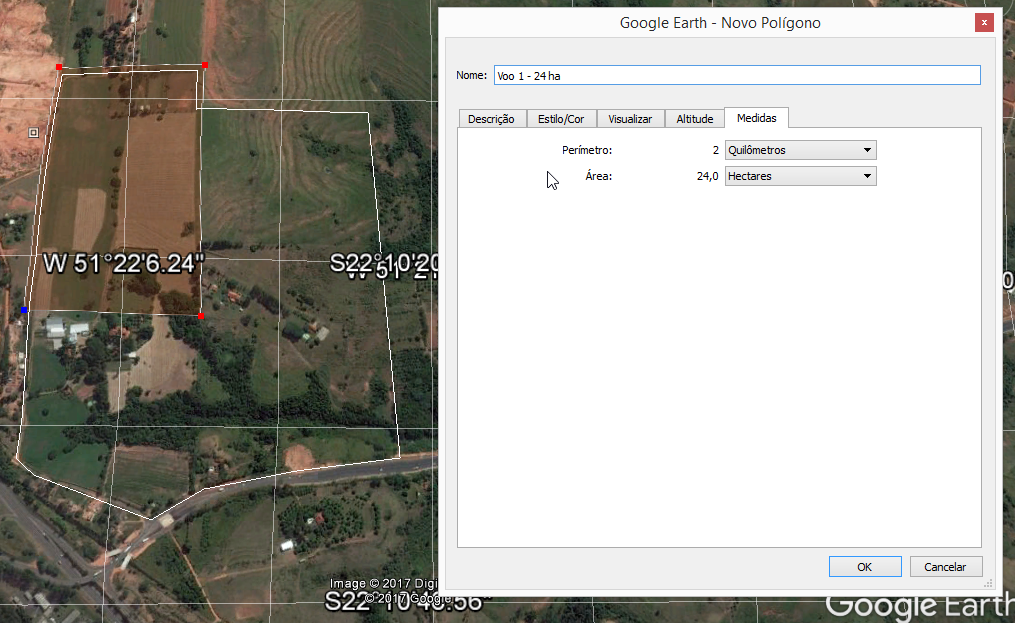
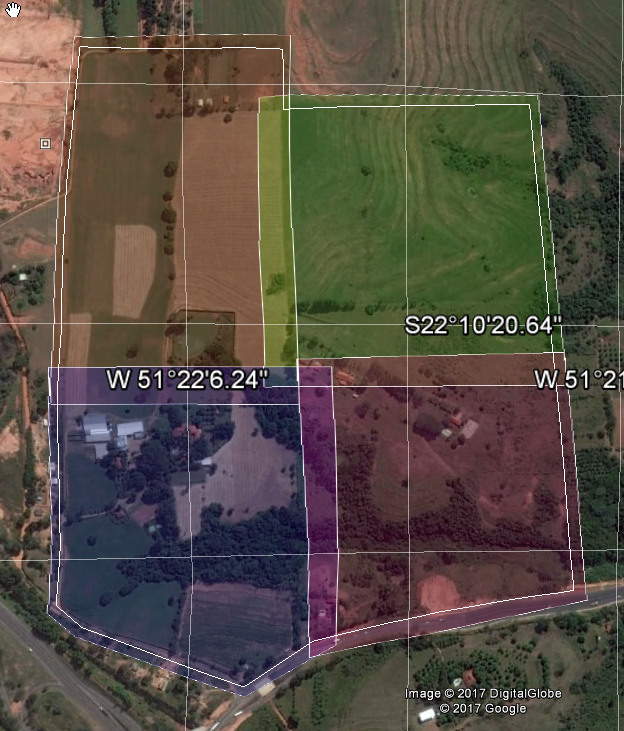
Para iniciar o planejamento dos voos segmentados iremos utilizar o Google Earth, que é gratuito e permite fazer um planejamento legal da área. Primeiro vamos criar um polígono de 24 há sobre o polígono de 78 ha, como mostra a figura abaixo.
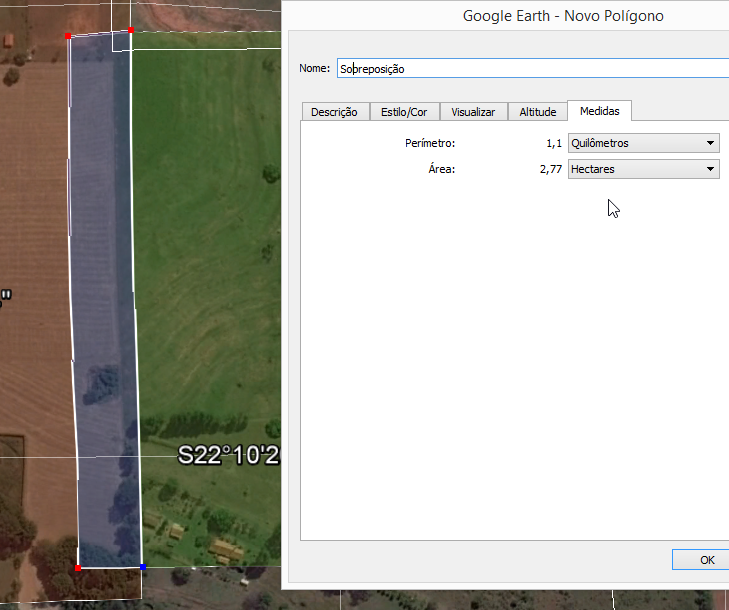
Em seguida deve-se fazer os demais planos de voo de modo que cubra toda a área e garantindo a sobreposição entre os voos, abaixo está exemplificado o segundo plano de voo da área.
Observa-se que teve uma área de sobreposição entre os voos, nesse caso a área sobreposta é de aproximadamente 3 há.
É necessário fazer os polígonos de no máximo 24 há cobrindo a área toda, mesmo que seja necessário mais de 3 baterias para fazê-lo, o importante é que a área toda seja coberta.
Normalmente os pontos de controle e verificação do trabalho são planejados após definir a área a ser voada, pois como é necessário seguir algumas regras para a implantação destes pontos.
Para mais informações a respeito dos pontos de controle:
E-BOOK Guia Definitivo sobre Pontos de Apoio – Clique para fazer download!
Pré-Venda Curso Online Pontos de Apoio – Clique para saber mais!
A etapa seguinte após o planejamento é a exportação desses polígonos de voo em formato .kml, depois estes devem ser importados para o aplicativo de planejamento de voo, em seguida definir as configurações do voo (altura de voo, sobreposições, etc) e ir para campo EXECUTÁ-LOS!
Em campo o procedimento de voo é normal, a única diferença é que serão vários voos seguidos.
Quer entender melhor como funciona as etapas de um mapeamento aéreo? Deseja aprender a fazer mapeamento aéreo utilizando um Phantom 4? Ou um Phantom 4 Pro? Ou um Phantom 3 PRO? Ou um Inspire? Sim, é possível! Conheça nosso curso de mapeamento aéreo com Phantom (Mas que vale para os demais, são poucas diferenças entre eles), segue o link abaixo para inscrição: 
Quaisquer dúvidas, críticas ou sugestões, basta comentar abaixo.
Abraço! Até a próxima!
Autor: Anderson Arias | Droneng – Drones e Engenharia





