Tempo de leitura: 7 minutos
A famosa estátua do Cristo Redentor, no Rio de Janeiro foi reconstruída em 3D usando um VANT. Condições climáticas desafiadoras e o tamanho do monumento significava que um planejamento cuidadoso seria necessário para completar o projeto e manter a segurança. Milhares de imagens foram capturadas em torno da estátua e processadas para criar uma nuvem de pontos grande e precisa e uma malha texturizada.
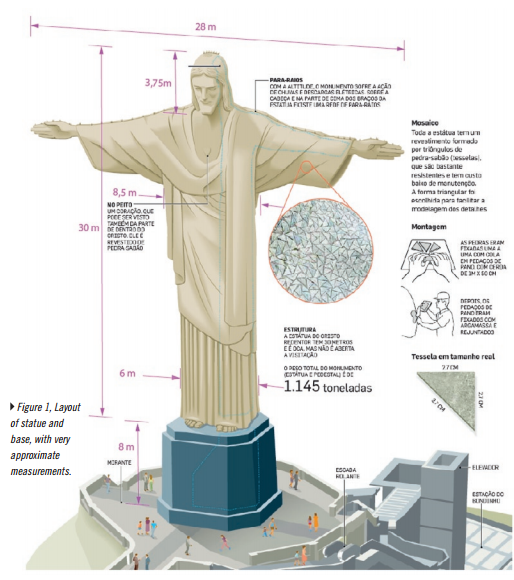
Imagens fascinantes da estátua do Cristo Redentor, no Rio de Janeiro, Brasil, foram vistas ao redor do mundo durante a Copa do Mundo da FIFA do ano passado. A famosa estátua não é apenas um ícone da cidade, mas também é uma maravilha da engenharia. O monumento tem uma altura total de 38 metros e 28 metros da envergadura (Figura 1). Construído a partir de concreto armado e coberto com telhas de pedra-sabão triangulares e olhar sobre a cidade a partir do topo dos 700 metros de altura sobre o morro do Corcovado.
A estátua foi concebida pelo escultor francês Paul Landowski e construído pelo engenheiro brasileiro Heitor da Silva Costa, entre 1922 e 1931. Não houve modelos 3D precisos da estátua até agora com o seu tamanho, localização, que desafia as condições climáticas que obstruí o uso da tecnologia existente, como Lidar. Em outubro de 2014, no entanto, a estátua foi capturada com sucesso usando um VANT no projeto chamado “Projeto Redentora”.
Tempo
O VANT foi usado para desafiar as condições climáticas do topo do morro do Corcovado. Em outubro, a velocidade média do vento é 30 km/h que é bem alto, mas ainda abaixo dos 50 km/h, velocidade do vento que o VANT pode sustentar. No entanto, o vento que atinge o pico cria uma pressão mais elevada no lado voltado para o vento e a pressão mais baixa no lado da sombra. Isto por sua vez pode criar uma corrente de ar de alta velocidade com um sentido ascendente sobre o lado da frente e padrões caóticos do fluxo que têm um efeito de puxar para baixo sobre o lado da sombra.
Apenas um piloto automático é capaz de lidar com tais condições. Com o controle remoto manual, o tempo de reação do piloto seria muito lento para responder às mudanças nas velocidades de vento. A visibilidade era outra questão a considerar; a fim de posicionar o Aeryon Scout (modelo de drone) em voo ou quando o veículo estava pairando ao lado da montanha.
Aterrizagem fora do perímetro do terraço teria resultado em uma queda irrecuperável para o lado da proteção da segurança dos visitantes à estátua, voos foram só permitidos fora do horário normal de visita, mas esses momentos do dia são geralmente propensos à névoa pesada o que pode reduzir à visibilidade a baixa de 5m.

Segurança
Descolagem e aterrizagem estavam restritas a uma área de um metro quadrado aos pés da estátua, uma vez que outras áreas foram obstruídas por itens como cabos. As grandes quantidades de ferro na estrutura de suporte abaixo da estátua resultaram em perturbações eletromagnéticas que confundiram a bússola eletrônica do VANT. Isto pode ser resolvido, forçando uma orientação inicial conhecida em seu sistema antes da descolagem.
Outra consideração foi como o veículo deveria lidar com uma possibilidade de perda de comunicação com o tablet de controle. O VANT tem vários sistemas contra falhas embutidos a ele para tais situações: ‘Casa e terra’, ‘Terra no lugar’ e ‘Casa e pairar’. No entanto, todas as opções realizadas tinham seu risco, quando a estátua estava entre o morro e colina.
Para minimizar esses riscos, o comando automatizado ‘Casa e terra’ foi criado para uma altitude de 50 metros para evitar a ponta da estátua. Além disso, a margem de bateria baixa foi aumentada para 300 segundos, o que é o dobro do tempo necessário para subir e descer a altura de 50 metros.
Aquisição de Dados
O Aeryon Scount, um quadricoptero, foi usado como plataforma. Foi equipada com uma bateria e uma câmera integrada que adquiri imagens 16MP. Controles básicos como tirar fotos, alteração de níveis de zoom e gravação de vídeo, foram apoiados por software em um tablet. Cada voo durou 10 minutos, logo após as baterias tiveram que ser substituídas e os dados baixados do VANT.
Os voos foram realizados apenas no período da manhã, antes do horário de funcionamento e também com boas condições meteorológicas. Um total de 19 voos foram realizados em mais de seis dias, resultando em 3.584 imagens. Um total de 2.090 imagens foram eventualmente utilizadas para a reconstrução.
Subprojetos
Toda a coleção de imagens foi subdividida em nove subprojetos: a cabeça, mão esquerda, mão direita, corpo, base inferior, de base média, base superior, penhascos e terraço. Isto permitiu o processamento paralelo de todos os dados mantendo o tamanho abaixo dos limites do projeto, superior a capacidade de processamento do software e hardware.
Os sinais GNSS perto da estátua foram influenciados pelo efeito de multicaminhamento. Por esta razão, o projeto foi processado sem informações geográficas; as informações GNSS foram imprecisas para trazer quaisquer benefícios para a reconstrução e teria enganado a calibração da câmera.
As imagens foram processadas usando software Pro Pix4Dmapper, dentro do qual foram utilizadas para calibrar a câmara e para reconstruir a posição e atitude de cada uma. Subsequentemente, as imagens orientadas foram processadas em uma nuvem de pontos e uma malha texturizada. Dentro de cada subprojeto, a reconstrução automática do Pix4D foi aumentada com pontos de amarração colocados manualmente.
Por exemplo, pontos de amarração manuais foram colocados sobre os para-raios nas mãos da estátua para unir as imagens que foram captadas em ambos os lados da mão. Pontos de amarração manuais também foram utilizados em locais onde as sombras nítidas confundiram o processo automatizado. Um total de 150 pontos de amarração manuais foram usados em todos os subprojetos.

Reconstrução final
Todos os subprojetos foram incorporados simultaneamente, com um total de 82 pontos de amarração. Em seguida, o software aplicou um algoritmo para criar uma nuvem densa de ponto para encontrar os pixels correspondentes nos pares de imagens. Após este passo, as ferramentas do Pix4Dmapper foram usadas para cortar as partes indesejadas e para filtrar pontos do fundo. Neste ponto, todo o modelo reconstruído teve uma alta precisão relativa, mas não carregava nenhum escala ou posição.
Uma medida do comprimento foi realizada sobre a base da estátua para definir a dimensão do modelo. Depois de ajustar a escala, as dimensões da estátua poderiam ser medidas a partir do modelo. A última nuvem de ponto consistia de 134,4 milhões de pontos e a malha 3D texturizados de 2,5 milhões de triângulos. A quantidade de detalhe nos modelos reconstruídos depende da distância entre VANT e a estátua.

Observações finais
Este projeto mostra que a tecnologia VANT permite a modelagem exata de estruturas que são de difícil acesso. Condições climáticas desafiadoras e restrições de segurança não pode ser um impedimento para um projeto bem sucedido desde que seja feito um planejamento cuidadoso do lugar. A divisão em vários subprojetos é necessária para alcançar a reconstrução de estruturas muito grandes.
Traduzido e adaptado
Fonte: Gim International edição VANT
CONHEÇA A DRONENG
Você já conhece tudo que a Droneng oferece em termos de capacitação para o mercado de mapeamento aéreo com drones?
Vai desde Cursos Online até Cursos Presenciais, que você pode conhecer e saber mais com os nossos especialistas.
Para isso é só clicar na imagem abaixo e entrar em contato com a gente. Estamos te esperando no nosso time de alunos!






