
Tempo de leitura: 13 minutos
Case Técnico: NTRIP Nordian x Pontos de Controle
1. Introdução
A acurácia posicional é um requisito indispensável para a elaboração de uma topografia confiável, capaz de atender aos padrões de qualidade exigidos em projetos de engenharia. Seja em obras de infraestrutura, loteamentos, projetos ambientais ou mineração, a acurácia dos levantamentos define diretamente a segurança, a viabilidade e o custo de execução das etapas seguintes.
Para alcançar esse nível de confiabilidade, diferentes métodos de correção têm sido empregados na aerofotogrametria com drones:
- Pontos de Apoio (GCPs): consiste em determinar as coordenadas em campo de alvos naturais ou artificiais para posteriormente serem utilizados no processamento das imagens. É a solução que geralmente apresenta os melhores resultados, porém, demanda tempo, deslocamento de equipe e maior esforço logístico, resultando em um alto custo de execução.
- RTK (Real Time Kinematic): utiliza uma base física em solo próximo à área de operação para transmitir correções em tempo real ao drone (rover). Possui acurácia centimétrica, mas exige o investimento em um receptor e apresenta limitações de distância e obstáculos em solo.
- PPK (Post-Processed Kinematic): método de pós-processamento que corrige os dados GNSS das imagens após a coleta através de uma base GNSS instalada em campo. Reduz a necessidade de conexão em tempo real, mais ainda exige um receptor em campo e etapas adicionais no fluxo de trabalho
- NTRIP (Networked Transport of RTCM via Internet Protocol): evolução dos métodos de correção em tempo real, fornece correção posicional via internet sem a necessidade de uma base física local. Essa característica torna o processo mais ágil e prático, eliminando a logística de montagem de equipamentos em campo e garantindo acurácia sempre que houver cobertura de internet.
Dentre esses métodos, o NTRIP destaca-se como uma solução escalável e eficiente, especialmente para profissionais que precisam de mobilidade e rapidez em levantamentos topográficos. Ao dispensar a instalação de bases físicas, reduz custos e simplifica a operação, mantendo a qualidade exigida pelos padrões técnicos.
Neste case técnico, exploramos a aplicação do NTRIP Nordian, testando sua performance em condições reais de campo e comparando os resultados obtidos. Nos próximos capítulos, apresentaremos em detalhes o processo, os dados levantados e a análise dos resultados, demonstrando o potencial dessa tecnologia para elevar a confiabilidade e a produtividade em projetos de engenharia.
Este case técnico foi elaborado através de uma colaboração entre a DronEng Drones e Engenharia e AGROBUILD Engenharia e Construção / Santa Albertina – SP.
2. NTRIP
O NTRIP (Networked Transport of RTCM via Internet Protocol) é um protocolo que permite transmitir correções GNSS em tempo real via internet. Diferente do método RTK, em que o usuário precisa montar uma estação base física próxima ao local de operação, no NTRIP essa base é substituída por uma base virtual.
Essa base virtual é criada a partir de uma rede de estações de referência fixas, mantidas pelo provedor de correções (como a Nordian). O sistema processa os sinais dessas estações e gera um ponto de referência geodésico próximo ao local onde o receptor (rover) está operando. Assim, o drone ou receptor GNSS em campo se conecta a essa base virtual via internet e recebe as correções necessárias para alcançar uma acurácia centimétrica.
O funcionamento pode ser resumido em três etapas:
- Coleta dos sinais GNSS – as estações fixas do provedor registram continuamente os sinais dos satélites (GPS, GLONASS, Galileo e BeiDou).
- Processamento e geração da base virtual – o servidor calcula os erros (órbita, relógio e atmosfera) e cria uma base virtual próxima à posição do rover.
- Transmissão das correções – as mensagens no formato RTCM 3.x são enviadas via internet para o drone, que aplica as correções em tempo real.
Na aerofotogrametria, essa solução elimina a necessidade de instalar bases físicas em campo. O DJI Mavic 3 Enterprise (Mavic 3E), utilizado neste case, possui um receptor GNSS com módulo RTK e suporte ao protocolo NTRIP. Isso significa que o operador pode configurar diretamente no aplicativo DJI Pilot 2 as credenciais fornecidas pelo serviço Nordian.
Durante o voo, o drone recebe as mensagens RTCM provenientes da base virtual e atualiza em tempo real as coordenadas GNSS registradas nas imagens. Com isso, cada foto já é georreferenciada com precisão centimétrica, otimizando o fluxo de trabalho e reduzindo (ou até dispensando) a necessidade de pontos de apoio.
1.2 O que o usuário precisa para utilizar o NTRIP
- Drone compatível: no caso do estudo, o DJI Mavic 3E com módulo RTK integrado.
- Assinatura ativa de um serviço NTRIP: como o fornecido pela Nordian.
- Conexão de internet em campo: geralmente via hotspot de celular conectado ao controle remoto do drone ou internet via satélite.
- Credenciais de acesso: usuário, senha, IP e porta do servidor.
- Configuração no software de voo: preenchimento desses dados no DJI Pilot 2 para habilitar a correção em tempo real.
Assim, o NTRIP cria a base virtual, e o drone atua como rover, recebendo correções sem a necessidade de infraestrutura física local.
3. Metodologia
Para avaliar o desempenho da solução de correção posicional via NTRIP Nordian, realizamos um estudo em uma área urbana, utilizando o drone DJI Mavic 3 Enterprise (Mavic 3E). O objetivo foi comparar os resultados obtidos com e sem o uso de pontos de controle, analisando a acurácia final do produto gerado em cada cenário.
Planejamento do voo
- Área de estudo: setor urbano com edificações, vias e áreas abertas.
- Altura de voo: 120 metros.
- Padrão de voo: cruzado (double grid), para garantir melhor cobertura e qualidade na reconstrução fotogramétrica.
- Sobreposição de imagens: 80% longitudinal e 80% lateral.
- GSD (Ground Sample Distance): 3,4 cm

Foram executados dois projetos distintos sobre a mesma área:
- Projeto com pontos de controle
- Foram implantados 6 pontos de controle horizontal e vertical (HV), distribuídos de forma homogênea na área de estudo.
- Além disso, foram levantados 6 pontos de verificação (CH), independentes, utilizados apenas para checagem da acurácia do produto final.
- O processamento das imagens foi realizado considerando os pontos de controle como referência principal.
- Projeto com correção NTRIP Nordian
- Neste cenário não foram utilizados pontos de controle.
- O voo foi realizado com o drone conectado ao serviço NTRIP Nordian, recebendo correções em tempo real durante toda a coleta.
- Os 6 pontos de verificação (CH) foram utilizados para avaliar a acurácia final do produto, garantindo a análise comparativa com o primeiro projeto.
Análise comparativa
Ao término do processamento, foi realizada uma comparação entre os dois projetos. O objetivo foi identificar diferenças em termos de acurácia planimétrica e altimétrica, avaliando se o uso exclusivo do NTRIP Nordian seria capaz de atingir resultados compatíveis com aqueles obtidos em levantamentos tradicionais apoiados por pontos de controle.
4. Resultados
4.1. Projeto 1 – Correção Posicional: Pontos de Controle
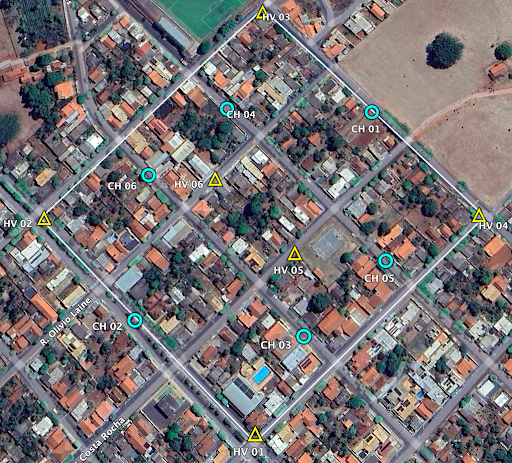
Para este projeto foram planejados 6 pontos de controles (HV) e 6 pontos de verificação (CH) distribuídos de forma homogênea na área como descrito na imagem a seguir:

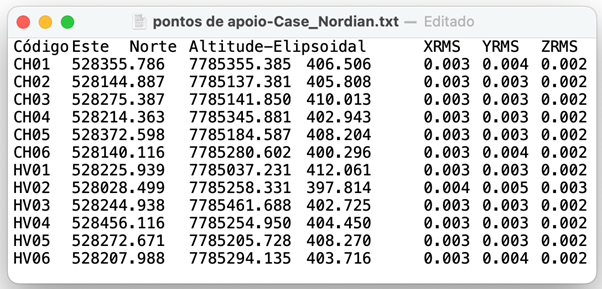
Os pontos de controle foram coletados através do receptor geodésico E300 pro , Survey, RTK, pelo método stop and go, onde cada ponto foi ocupado por 2 minutos e com solução fixa, utilizando controladora P8II e programa SurPad 4.2 e uma base GNSS física a 700 metros do alvo mais distante, gerando as coordenadas de cada ponto como mostra a imagem a seguir:
Por ser uma área urbana foi utilizado a metodologia de voo cruzado, onde o primeiro voo foi realizado no sentido norte-sul e o segundo no sentido leste-oeste, ao final foram capturadas 493 imagens.
O processamento das imagens foi realizado através do software Agisoft MetaShape Professional, a seguir algumas imagens retiradas do relatório de processamento.
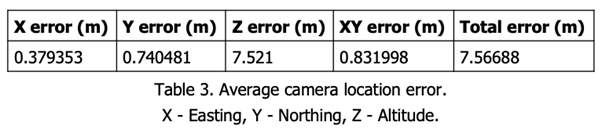
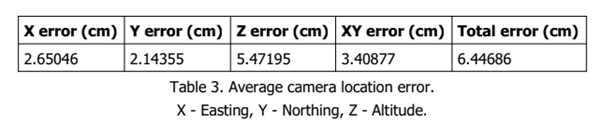
A imagem abaixo representa o erro médio de localização da câmera (drone), ou seja, o erro do GNSS de navegação do drone, sendo 38 cm em X, 74 cm em Y e 7,5 metros em Z.
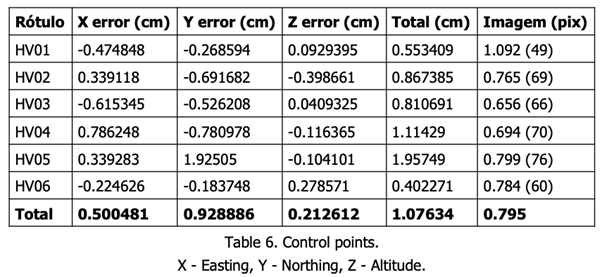
A tabela abaixo representa a precisão de cada um dos 6 pontos de controle utilizados no projeto, onde os erros médios foram: X: 0,5 cm, Y: 0,9 cm e Z: 0,2 cm.
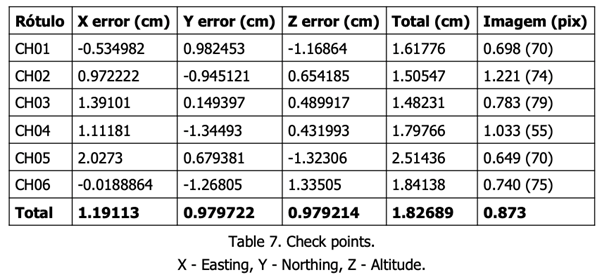
A tabela a seguir apresenta os resultados de acurácia obtidos nos pontos de verificação. Diferentemente dos pontos de controle, os pontos de verificação não participam do processamento das imagens (ajustamento de observações) e, portanto, não sofrem qualquer influência desse processo.
Por esse motivo, eles são considerados a referência de qualidade do projeto. Após o processamento, o software estima as coordenadas dos pontos de verificação a partir das imagens, e a diferença entre essas coordenadas estimadas e as coordenadas medidas em campo corresponde à acurácia final do levantamento.
O GSD final do projeto foi 3,6 cm, a partir disso conseguimos estimar a acurácia final do projeto sendo:
X e Y = 1 a 1,5 x GSD final
Z = 2 a 3 x GSD final
X e Y = 3,6 a 5,4 cm
Z = 7,2 a 10,8 cm
Resultado final obtido através dos pontos de verificação:
X = 1,19 cm
Y = 0,98 cm
Z = 0.98 cm
Todos os vetores X,Y e Z ficaram abaixo do esperado, resultando em um excelente resultado.
4.2. Projeto 2 – Correção por NTRIP Nordian
O NTRIP Nordian é uma solução internacional de correção GNSS em tempo real desenvolvida pela empresa Nordian, empresa americana, sediada em Austin, Texas.
A tecnologia fornece correções de alta precisão via internet, criando bases virtuais próximas ao local de operação do rover, como receptores GNSS ou drones. A cobertura do serviço é ampla e já está disponível em diversos países, incluindo Brasil, Estados Unidos, Canadá, Europa, Coreia do Sul e Austrália.
Mais informações: https://www.nordian.com/
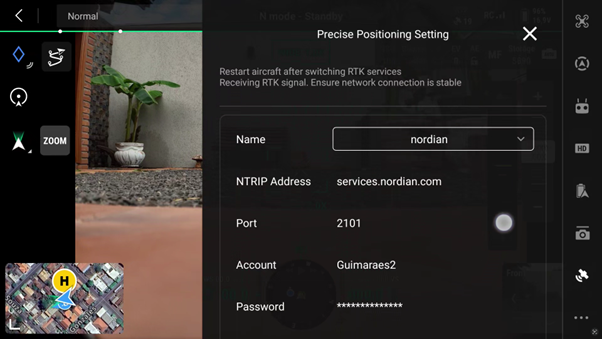
Para utilizar o sistema é necessário fazer a contratação de um plano, inserir os dados do servidor e dados de acesso diretamente no controle do Dji Pilot 2, como mostrado na figura a seguir:
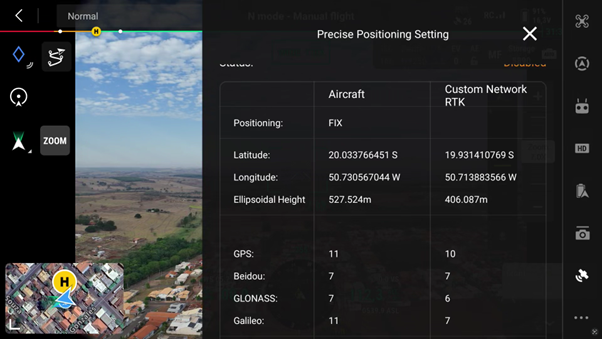
Inicialmente a solução apresenta como flutuante e a precisão varia em torno de 1,5 metros, após subir o drone a uma altura de 70 m e aguardar alguns segundos a solução se apresenta como fixa e a precisão cai para uma média de 3 centímetros, como apresentado na figura a seguir:
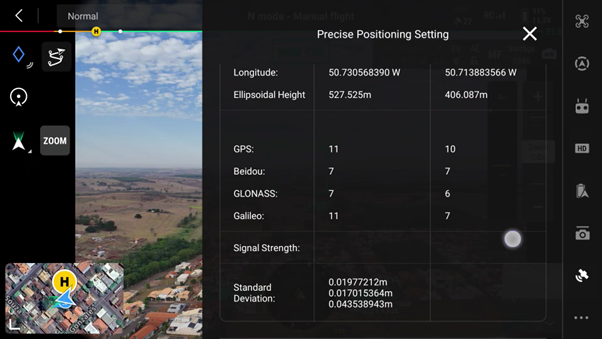
Na imagem acima os desvios padrões da solução fixa em X: 1,9 cm, Y: 1,7 cm e Z: 4,3 cm
Neste projeto também foi realizado um voo cruzado totalizando 493 imagens resultantes dos dois voos. O processamento das imagens foi realizado no Agisoft MetaShape Professional utilizando apenas os 6 pontos de verificação.
No primeiro projeto o erro total da precisão do GNSS de navegação do drone foi de 7,5 m, utilizando o NTRIP Nordian o erro total apresentado foi de 6,44 cm, aqui já conseguimos notar uma grande diferença entre as soluções.
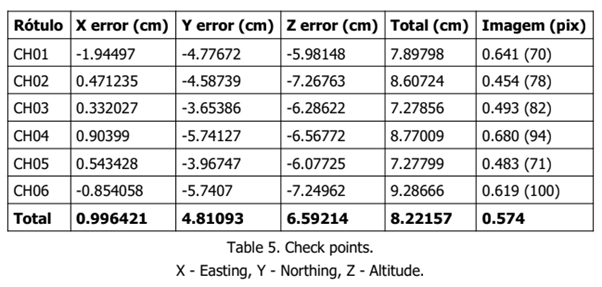
Após o processamento das imagens utilizando os pontos de verificação a acurácia final do projeto foi de X: 0,99 cm, Y: 4,8 cm e Z: 6,59 cm, a imagem a seguir mostra os detalhes das acurácias de todos os pontos de verificação utilizados no projeto:
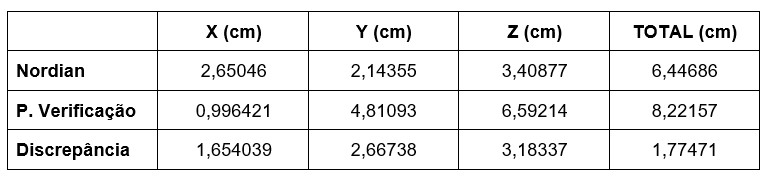
A acurácia dos pontos de verificação ficou bem próxima da acurácia das câmeras apresentadas anteriormente, isso mostra que de fato o sistema NTRIP Nordian tem um bom desempenho apresentando acurácia centimétrica, a tabela a seguir apresenta a discrepância entre os dois métodos:
4.3. Comparação entre os dois métodos de correção
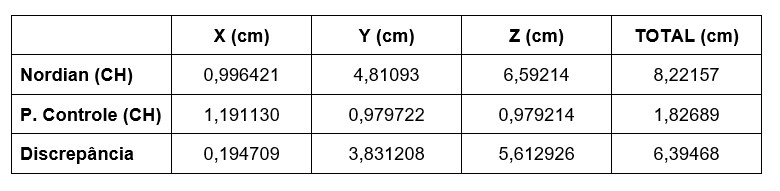
A tabela abaixo mostra a discrepância entre os pontos de verificação dos dois projetos:
Conclusão
Os testes realizados demonstraram que, como era esperado, o projeto com pontos de controle (GCPs) apresentou um resultado superior em termos de acurácia, atingindo erros médios próximos a 1 cm nos pontos de verificação. Já o projeto utilizando o sistema de correção NTRIP Nordian apresentou erros médios próximos a 5 cm. A diferença foi relativamente pequena, ficando dentro da ordem de centímetros e plenamente aceitável para a maioria das aplicações em engenharia.
Essa proximidade nos resultados válida a qualidade do NTRIP como uma tecnologia robusta, prática e eficiente. A possibilidade de criar uma base virtual elimina a necessidade de aquisição ou aluguel de receptores GNSS geodésicos e reduz significativamente os custos e o tempo de implantação de pontos de controle em campo.
Além disso, com a disponibilidade de internet móvel cada vez mais ampla — incluindo soluções de cobertura em áreas remotas, como a internet via satélite da SpaceX (Starlink), o uso do NTRIP se torna ainda mais viável. Essa combinação garante que profissionais possam realizar levantamentos em locais isolados mantendo acurácia centimétrica sem comprometer a produtividade e com diminuição dos custos.
Portanto, o estudo confirma que o NTRIP Nordian é uma solução tecnicamente viável e economicamente vantajosa para projetos que demandam acurácia em topografia e aerofotogrametria. Ele representa um avanço significativo em relação aos métodos tradicionais, ao unir qualidade técnica, simplicidade operacional e alta escalabilidade.





